






 Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >Motor Data Legend
| Symbol | Dimension | English | Description | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| M0 | Nm | Standstill torque | The standstill torque can be maintained indefinitely at a speed n<100 rpm and rated ambient conditions. | |||||||||||||||
| Mn | Nm | Rated torque | The rated torque is produced when the motor is drawing the rated current at the rated speed. The rated torque can be produced indefinitely at the rated speed in continuous operation (S1). | |||||||||||||||
| I0rms | A | Standstill current | The standstill current is the effective sinusoidal current which the motor draws at n<100 rpm to produce the standstill torque. | |||||||||||||||
| I0max | A | Peak current | The peak current (effective sinusoidal value) is approximately equivalent to 3-, 4-, or 5-times the rated current depending on the motor type and size. The actual value is determined by the peak current of the servo amplifier which is used. | |||||||||||||||
| In | A | Rated current | ||||||||||||||||
| nn | 1/min | Rated speed | ||||||||||||||||
| ngrenz | 1/min | allowed limit speed | ||||||||||||||||
| KTrms | Nm/A | Current constant | The torque constant defines how much torque in Nm is produced by the motor with 1A r.m.s. current. The relationship is M=I x KT (up to I = 2 x I0) Zusammenhang KT/KE: 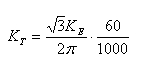 |
|||||||||||||||
| KE | mVmin | Voltage constant | The voltage constant defines the induced motor EMF, as an effective sinusoidal value between two terminals, per 1000 rpm | |||||||||||||||
| Pn | kW | Rated power | ||||||||||||||||
| Un | V | DC Bus Link voltage | ||||||||||||||||
| UN | V | Mains rated voltage | ||||||||||||||||
| pmot | - | Motor pole number | ||||||||||||||||
| pres | - | Resolver pole number | ||||||||||||||||
| R20 | Ohm | Winding resistance | measured Phase- Phase at 20°C | |||||||||||||||
| L | mH | Winding inductance | measured Phase- Phase | |||||||||||||||
| J | kgcm² | Rotor moment of inertia | The constant J is a measure of the acceleration capability of the motor. For instance, at I0 the acceleration time t from 0 to 3000 rpm is given as::
with M0 in Nm and J in kgcm² |
|||||||||||||||
| MR | Nm | Static friction torque | ||||||||||||||||
| FR | N | Radial load permitted | shaft end at rated speed | |||||||||||||||
| FA | N | Axial load permitted | shaft end at rated speed | |||||||||||||||
| tth | min | Thermal time constant | The constant tth defines the time for the cold motor, under a load of I0, to heat up to an overtemperature of 0.63 x 105 Kelvin. This temperature rise happens in a much shorter time when the motor is loaded with the rated current. | |||||||||||||||
| tbrh | ms | These constant defines the "open" response time of the holding brake when operated with the rated voltage from the servo amplifier. | ||||||||||||||||
| tbrl | ms | These constant defines the "close" response time of the holding brake when operated with the rated voltage from the servo amplifier. |
