






 Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >Calculating Actual Motor Torque and Current with PN Motion Engine
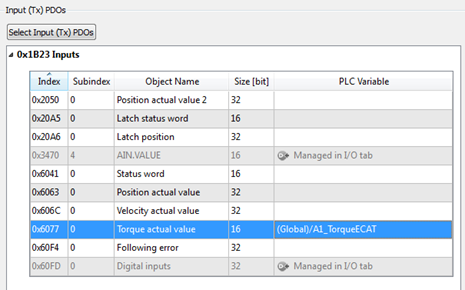
ECAT (Ethercat) Object 6077 is part of the standard ECAT PDO mappings to KAS from the AKD drive. From the PDO section tab of an AKD axis in an an IDE project.
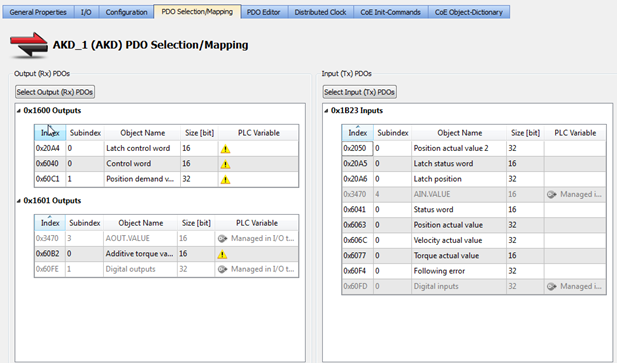
It provides current in units of units 0.1 percent of drive rated current where a value of 1000 = the drive’s rated current. This value coming over the ECAT can be connected to a project variable by right clicking on the field and mapping an existing or new variable. In the example below the variable A1_TorqueECAT (highlighted in blue) has been mapped to object 0x6077:
Code can then be added to the IDE project to read the Actual Motor Current and Torque::
Actual Current Value:
A1_ActCurrent = ( A1_DriveIcontRating* ANY_TO_LREAL(A1_TorqueECAT))/1000);
Actual Torque Value:
Multiply Actual Current by the motor’s Kt value:
A1_ActTorque = A1_ActCurrent *A1_MotorKt;
Example:
If an AKM31H motor (rated for 5.85 amps continuous and a Kt = 0.21 Nm/amp) was being used with a 6 amp continuous AKD drive, and has a A1TorqueECAT value = 730
A1_ActCurrent = ( A1_DriveIcontRating* ANY_TO_LREAL(A1_TorqueECAT))/1000);
= 6*730/1000 = 4.38 amps
and
A1_ActTorque = M1_ A1_ActCurrent *A1_MotorKt
= 4.38 * 0.21 = 0.920 Nm

Comments
What's the accuracy of this "actual torque calculation result" ?
I need the error tolerance for this value in a sensitive application.
Thanks.
With the AKD drive, the current feedback resolution is Max Current (of the drive) / 128.
What motor will you be using? And what is the specific model number/current rating of the drive?
Thanks for the reply.
I use S-72402 Servo Star with a AN Asynchronous Servo Motor (Lenze MCA-21X17)
It seems this motor's rated current is 22.5 A. So, is the resolution of the actual torque information which is derived from 6077 equals to 22.5 / 128 = 0.175 Nm?
This information will be used for qualification test of a dc motor.
Best regards..
0x6077 Sub 0 = 3280 for current feedback of 48 amps
0x6077 Sub 0 = 1640 for current feedback of 24 amps
Resolution of the current feedback( M1_ A1_ActCurrent ) is:
48/3280 = 0.014634 amps or 14.634 milliAmps
0x6077 Sub 0 will report out current in increments of 14.6 milliAmps
Note: The current feedback in the S700 drive has a resolution of approximately 11 bits (2048). Then the Motor torque is:
A1_ActTorque = M1_ A1_ActCurrent *A1_MotorKt