






 Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >Comissioning of Hall only
Hall-ONLY as a Feedback in S300/S700 Drives:
Hall-ONLY as a Feedback has some specific characteristics. This document aims to enhance the comprehension of Hall-ONLY.
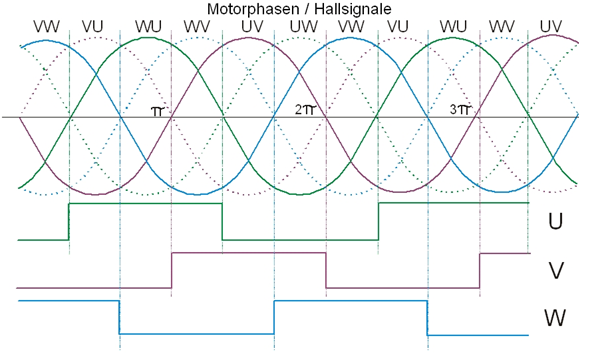
Hall-segments:
For any electrical revolution (2 motorpoles) the Hall-sensor gives out 6 electrical pulses. This means 60° (of an electrical revolution) per pulse.
For further information visit Hall Geber in our Wiki.
Hall-ONLY feedback with low speed:
The drive receives a new position information by hall-sensor every 60°. If we assume that the motor has 6 poles, one mechanical revolution = 3 electrical revolutions. This means, every 20° we receive a new Hall-Position: 0°, 20°, 40°, 60°,…, 340°.
This information is not enough for a reasonable controlling in the lower speed range.
For this reason there are two controlling-methods, which are applicable depending on the velocity-feedback.
In the lower speed range (velocity-feedback is lower than SLISWITCH) the motor is controlled sensor-less. Above the velocity in SLJSWITCH the drive uses the position information from the hall-segments (commutation, velocity, position)
The following concept of controlling are integrated in S300 / S700:
- Stepper mode, U/F operation:
The drive operates like a stepper drive, U/F curve.
This mode is activated by SLMODE 1.
- HF mode (High frequency injection)
This mode is activated by SLMODE 0. It just exists for compatibility reasons and will not be developed further.
ASCII parameters for Hall-ONLY:
-
SLMODE: With this parameter you can choose between Stepper Mode (U/F) or HF function. This function is used in the lower speed range only.
- SLMODE 0: Enable HF mode. In this mode TEN must be zero. If not, no torque will be applied.
- SLMODE 1: Enable stepper mode(U/F). This mode is recommended.
- TEN: is set internally by firmware if SLMODE =1. Depends on velocity feedback and SLMODE:
- TEN 0: just in SLMODE 0.
- V < SLJSWITCH HF active.
- V > SLJSWITCH Hall-information is used for controlling .
- TEN 1: V < SLJSWITCH: U/F active.
- TEN 2: V > SLJSWITCH: Hall-information is used for controlling.
- TEN 0: just in SLMODE 0.
- SLJSWITCH: Threshold value for lower speed range. Default 500 RPM.
- SLTSWITCH: Transition time from lower speed range to higher speed range in ms. Default value: 200ms. The motor continues using SLMODE, before hall-sensor based controlling is activated.
- DRVCNFG4.Bit11: Improved calculation of the current speed in hall-only mode. This function is not active by default (for compatibility reasons), but should be used in new hall-only applications.
OPMODE 2/3 Torque mode
Torque mode cannot be used with Hall-only. Even without a torque-command, the motor has a torque (if drive enabled), because the U/F or HF function is active in the low speed range.
Commutation finding ZERO, MPHASE:
MPHASE is calculated by the ZERO function in OPMODE 2, like all other feedbacks.
Because Hall-Only only has one impuls per 60° (electrical), MPHASE has an accuracy of ±30° (electrical). The drive commutates in the low speed range sensorless and uses MPHASE and sensor-signals for commutation in the normal speed range.
Fast comissioning:
- DRVCNFG4.Bit11= 1
- SLMODE 1 //in SLMODE 1 TEN is controlled automatically
In SLMODE 0 TEN has to be 0!
- SLACCMAX 100 rpm/s //Can be increased when in use.
- ACC=DEC=DECDIS=DECSTOP=500 rpm/s // Can be increased when in use.
- MRESBW 50 //between 30 and 100
- ….?
