






 Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >Setup of unknown motors - Commutation Alignment
Valid for AKD
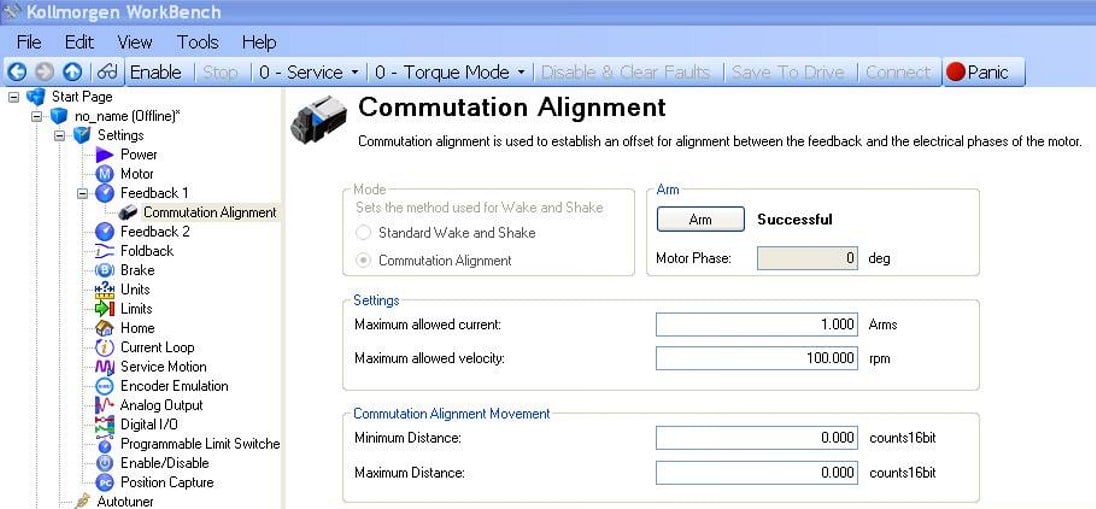
- Set the correct motor and feedback pole number
- Motor should be separated from the mechanics (load not coupled)
- Set the maximum current depending on the motor size
- Switch on HW Enable / switch off SW Enable
- Start the function with ARM
- Switch on SW Enable, the commutation detecting work automatically
- Do some measures to detect end eliminate extraordinary high or low values
- Update the parameter Motor.Phase with the measured phase angle and save the parameter.
