






 Startseite >
Startseite > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >EnDat
Referenz
Heidenhain Bestellbezeichnung |
AKD FB1.SELECT | S300/S700 FBTYPE | S400/S600 FBTYPE |
Befehlssatz |
Inkrementalsignale |
|---|---|---|---|---|---|
| EnDat 01 | 30, 21 | 4,7,21 | 3,4,6,7,16 | EnDat 2.1 / 2.2 (beide möglich) |
mit |
| EnDat 21 | - | - | - | ohne | |
| EnDat 02 | 30,21 | 4,7,21 | 6,7,16 | EnDat 2.2 | mit |
| EnDat 22 | 31 | 32, 34 | - | EnDat 2.2 | ohne |
Allgemeines
Das ENDAT- Interface von HEIDENHAIN ist eine digitale, bidirektionale Schnittstelle für Messgeräte. Sie ist in der Lage, sowohl Positionswerte von inkrementalen und absoluten Messgeräten auszugeben, als auch im Messgerät gespeicherte Informationen auszulesen, zu aktualisieren oder neue Informationen abzulegen. Aufgrund der seriellen Datenübertragung sind 4 Signalleitungen ausreichend. Die Daten werden synchron zu dem von der Folgeelektronik vorgegebenen Taktsignal übertragen. Die Auswahl der Übertragungsart (Positionswerte, Parameter, Diagnose ...) erfolgt mit Mode- Befehlen, welche die Folgeelektronik an das Messgerät sendet.

EnDat 2.1
- Absolute Positionswerte
- Parameter senden und empfangen
- Reset
- Testbefehl
- Testwerte
EnDat 2.2 (enthält EnDat 2.1)
Die erweiterte Schnittstellenversion ENDAT 2.2 ist von der Kommunikation, den Befehlssätzen und Zeitbedingungen kompatibel zur bisherigen Version 2.1, bietet jedoch deutliche Vorteile. So ist es zum Beispiel möglich mit dem Positionswert sogenannte Zusatzinformationen zu übertragen, ohne dafür eine eigene Abfrage zu starten. Dazu wurde das Protokoll der Schnittstelle erweitert und die Zeitverhältnisse wie folgt optimiert:
- Taktfrequenz (CLOCK) erhöhen (8 MHz)
- Rechenzeit optimieren (Positionswertermittlung innerhalb 5 µs)
- Totzeit (Recovery Time) minimieren (1,25 bis 3,75 µs)
- Positionswerte für inkrementale und absolute Messgeräte
- Zusatzinformationen zum Positionswert
- Diagnose,Testwerte
- Absolute Positionswerte nach Referenzierung von inkrementalen Messgeräten
- Parameter senden und empfangen
- Kommutierung
- Beschleunigung
- Grenzlagesignal
Funktionsbeschreibung
Das ENDAT- Interface überträgt in zeitlich eindeutiger Abfolge Positionswerte bzw. physikalische Zusatzgrößen und dient zum Auslesen und Beschreiben des Messgeräte internen Speichers.
- Positionswerte können mit oder ohne Zusatzinformationen übertragen werden. Die Zusatzinformationen selbst sind über Speicherbereich und Adresse wählbar. Zusammen mit dem Positionswert können auch andere Funktionen wie Parameter lesen und schreiben nach vorangegangener Speicherbereichsauswahl aufgerufen werden. Durch die gleichzeitige Übertragung mit dem Positionswert lassen sich auch von im Regelkreis befindlichen Achsen Zusatzinformationen abfragen und Funktionen ausführen.
- Parameter lesen und schreiben ist sowohl als separate Funktion als auch in Verbindung mit dem Positionswert möglich. Nach der Auswahl des Speicherbereichs können Parameter gelesen oder geschrieben werden.
- Reset- Funktionen dienen zum Zurücksetzen des Messgeräts bei Fehlfunktionen. Ein Reset ist anstelle oder während der Positionswert- Übertragung möglich.
- Eine Inbetriebnahmediagnose ermöglicht eine Überprüfung des Positionswertes bereits im Stillstand. Ein Testbefehl veranlasst das Messgerät die entsprechenden Testwerte zu senden.
Datenübertragung
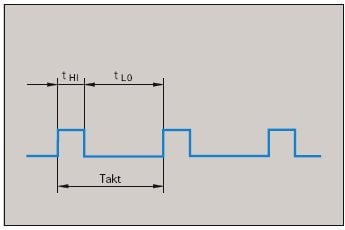
Zur Synchronisation der Datenübertragung wird von der Folgeelektronik ein Takt (CLOCK) vorgegeben. Im Ruhezustand liegt die Taktleitung auf HIGH-Pegel.
Ohne Laufzeitkompensation ist die Taktfrequenz variabel zwischen 100 kHz und 2 MHz. Die maximal zulässige Taktfrequenz hängt von der Kabellänge zwischen Messgerät und Folgeelektronik ab (siehe Diagramm). Da besonders bei großen Kabellängen und höheren Taktfrequenzen die Signallaufzeit für die eindeutige Zuordnung der Daten störende Größenordnungen annimmt, kann sie in einem Korrekturlauf ermittelt und kompensiert werden. Mit dieser Laufzeitkompensation in der Folgeelektronik sind Taktfrequenzen bis 8 MHz bei Kabellängen bis maximal 100 m möglich. Ab 30 m Kabellänge sind besondere Maßnahmen zu treffen.
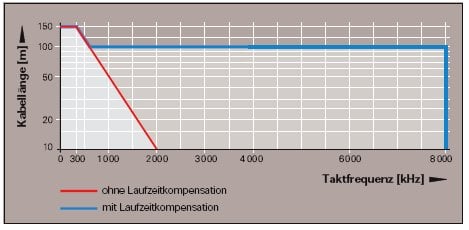
Die in den Diagrammen angegebenen zulässigen Taktfrequenzen gelten bei einem Tastverhältnis des Taktes von 1:1.Das heißt, HIGH- und LOW- Pegel des Taktes sind gleich lang. Bei einem abweichenden Tastverhältnis des Taktes errechnet sich die theoretische Taktfrequenz aus fc = 1/2tmin.
Ermitteln der Signallaufzeit
Nach jeder Hardware- Änderung der Übertragungsstrecke muss die Signallaufzeit ermittelt werden, am besten automatisch nach jeder Spannungsunterbrechung.
Die Folgeelektronik sendet den Mode- Befehl "Messgerät sende Positionswerte ohne Zusatzinformation" an das Messgerät. Nachdem das Messgerät auf Senden umgeschaltet hat, d.h. nach insgesamt 10 Taktperioden, startet mit jeder steigenden Taktflanke ein Zähler in der Folgeelektronik. Dieser erfasst als Signallaufzeit den Abstand zwischen der letzten steigenden Taktflanke und der Flanke des Start- Bits. Der Vorgang sollte mindestens dreimal wiederholt werden, um Störungen während der Laufzeitermittlung auszuschließen und den Wert auf Konsistenz zu prüfen. Die Signallaufzeit wird bei verminderter Taktfrequenz (100 kHz bis 200 kHz) ermittelt. Um eine ausreichende Genauigkeit zu erzielen, muss jedoch mit einer internen Frequenz abgetastet werden, die mindestens acht mal höher ist, als die später zur Datenübertragung verwendete Taktfrequenz.

Absolutwertgeber mit EnDat 2.2

Quelle
Technische Information Heidenhain GmbH,
02/2004, 383942-12·10·2/2004·F&W

Kommentare
I would like some further clarification regarding the differentiation between EnDat types, compatibility with Kollmorgen and 3rd party devices, and supported features.
Kollmorgen provides the EQN1125 and EQN1325 encoders on the AKM motors and these have output type of EnDat 2.2/01, which I understand is an EnDat 2.1 equivalent.
Q1: What exactly is EnDat 2.2/01? (Is it EnDat 2.2 hardware with EnDat 2.1 firmware?)
Q2: Does this encoder not support the advanced EnDat 2.2 command set?
Q3: Third party device interfacing: typically if another device is EnDat 2.2 compatible can it operate with an EnDat 2.1 encoder with the limited command set?
Q4: Please confirm: the AKD is not compatible with an EnDat 2.1 encoder without incremental signals (per reference chart above). Additionally does this mean the AKD would not accept an EnDat 2.2/01 encoder if the incremental signals were unwired?
Answer to Question 1: Endat 2.2/01 is the Endat 2.2 version of Endat 2.1. Endat 2.2 is the latest version of Endat, and Heidenhain made an Endat 2.2 version that is the same as Endat 2.1, called Endat 2.2/01. Endat 2.1 and Endat 2.2/01 both consist of analog sine and cosine channels, and the data and clock channels. So in all, there is Sine+, Sine-, Cos+, Cos-, Data+, Data-, Clock+, Clock-.
Answer to Question 2: Endat 2.2/01 and Endat 2.2/22 both have the command set (features) of Endat 2.2.
Answer to Question 3: No. A device compatible with only Endat 2.2 (specifically Endat2.2/22, Data-only) is not compatible with Endat 2.1 or Endat 2.2/01. Endat 2.1 and Endat 2.2/01 use the Sine and Cosine signals for the incremental encoder counts. Endat 2.2/22 is only Data/Clock and uses the data for determining absolute encoder position continuously. In relation to Kollmorgen drives, Endat 2.1 and Endat2.2/01 encoders only use the data channel for determining initial encoder position when the drive boots up. The Endat 2.1 and Endat 2.2/01 data channel is not used after the drive reads the initial encoder position value.
Answer to Question 4: Correct. For use with the AKD, Endat 2.1 and Endat 2.2/01 encoders must use the Sine and Cosine analog signals as the incremental position count. When selecting the AKD feedback mode for Endat 2.1 equivalent (also Endat 2.2/01), the AKD firmware expects to see the analog signals.